僒僀儞攇偲嬮宍攇丂偦偺俀
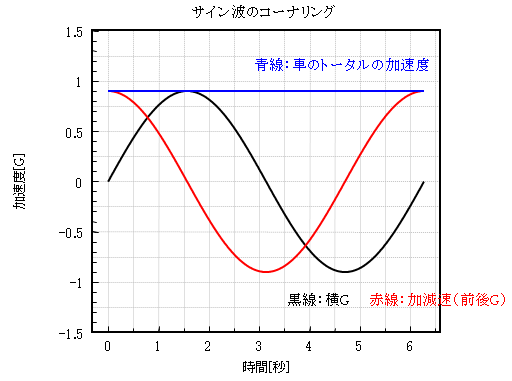
恾4丂僒僀儞攇僐乕僫儕儞僌偺僀儊乕僕
偝偰丄懕偒偱偡丅
傑偢僒僀儞攇塣揮偱偡偑丄僼儖僽儗乕僉帪偼偄偄偱偡偹丠偙傟偼妋偐偵0.9[G]偵嬤偄悢帤偑弌傞偱偟傚偆丅 偱偡偑僽儗乕僉偺榖偵彂偄偨捠傝丄嵟戝偺尭懍G傪弌偡偵偼僼儖僽儗乕僉儞僌帪偵慜屻偺僞僀儎偵妡偐傞壸廳偑弌棃傞尷傝摨偠偱偁傞昁梫偑偁傞偱偟傚偆丅 偦偟偰億儖僔僃側偳偺儕傾僄儞僕儞偺幵偼偦偺偨傔偵桳棙側儗僀傾僂僩偱偟偨偹丠丠
偝偰丄栤戣偼僐乕僫儕儞僌偱偡丅 1.5昩傑偱僽儗乕僉傪娚傔側偑傜丄偮傑傝僽儗乕僉傪巆偟偰僴儞僪儖傪愗傞偲僞僀儎偵妡偐傞壸廳偼偳偆側傞偱偟傚偆丠
摉慠側偑傜僽儗乕僉傪摜傫偱尭懍G偑弌偰偄傟偽丄慜椫偺壸廳偑屻椫傛傝傕戝偒偄偙偲偵側傝傑偡丅 FF幵側偳偺慜偵僄儞僕儞偺偁傞幵側傜偽丄惷巭帪偱偝偊慜椫偺壸廳偑戝偒偄偺偱丄尭懍帪偵偼壸廳偺杦偳偑慜椫偵忔偭偰偄傞偱偟傚偆丅
偙偙偱巚偄弌偟偰壓偝偄丅 僞僀儎偺壸廳偲僌儕僢僾偺旕慄宍惈偺榖傪丅 僞僀儎傪懢偔偡傞偲壗屘僌儕僢僾偑忋偑傞偺偐傗丄幵廳偲壸廳偲僌儕僢僾偺娭學傪尒傟偽傢偐傞捠傝丄慜椫偩偗偵戝偒偄壸廳傪忔偣傞偲丄僞僀儎偺杸嶤學悢偑偩傫偩傫偲棊偪偰偄偭偰偟傑偄傑偡丅 偮傑傝杮棃偼0.9偱偁偭偨偼偢偺杸嶤學悢偑丄椺偊偽0.7偲偐偵側偭偰偟傑偆傢偗偱偡丅
幵偑敪惗偡傞嵟戝偺杸嶤椡丄偮傑傝僌儕僢僾椡偼丄
F亖兪mg
偱偟偨偹丠丂偙偙偱m偼幵廳丄g偼廳椡壛懍搙偱偡丅
偙傟偼4椫偵嬒摍偵壸廳偑妡偐偭偰偄傞帪偵敪惗偱偒傞棟憐抣偱偡丅 偲偙傠偑壸廳偑慜椫偩偗偵忔偭偰偟傑偆偲兪偺抣偑壓偑偭偰偟傑偆偺偱偡丅 偦偆側傞偲幵慡懱偺僌儕僢僾偑壓偑傞偙偲偵側傝傑偡偹丅
偦傟傪杊偖偨傔偵丄戝偒側壸廳偑妡偐傞廳偄幵偱偼懢偄僞僀儎傪棜偄偰愙抧柺愊傪憹傗偟偨傝丄儗乕僔儞僌僇乕偱偼壸廳堏摦傪尭傜偡偨傔偵懌傪屌傔偨傝廳怱傪壓偘偰儘乕儖傗僺僢僠儞僌傪尭傜偟偰偄傞傢偗偱偡丅
兪傪棊偲偝偢偵堐帩偟懕偗傞偨傔偵偼丄偮傑傝僞僀儎偺惈擻傪嵟戝偵弌偡偨傔偵偼丄弌棃傞尷傝4椫偵嬒摍偵壸廳傪妡偗傞昁梡偑偁傞傢偗偱偡丅
偦偺娤揰偐傜尵偆偲丄1.5昩傑偱僽儗乕僉傪巆偟偰偄傞塣揮偼偳偆偱偟傚偆偐丠
偙傟偱偼僐乕僫儕儞僌傪巒傔偰偐傜1.5昩娫丄僋儕僢僾傑偱偢偭偲慜椫偵戝偒側壸廳偑忔偭偰偄偰丄屻椫偵偼杦偳壸廳偑妡偐偭偰偄傑偣傫丅 偙偺娫偼幵慡懱偺兪偑嵟戝偵側傞傛偆側丄4椫偵嬒摍側壸廳傪妡偗傜傟偰偄側偄傢偗偱偡丅
偮傑傝僋儕僢僾傑偱偺1.5昩娫偼丄僞僀儎偺兪偼0.9傪偢偭偲壓夞偭偰偄傞偙偲偵側傝傑偡丅 恾4偱偼壛尭懍G偲墶G傪懌偟偨惵慄偼忢偵堦掕偱0.9偲側偭偰偄傑偡偑丄幚嵺偵偼偦偆偼側傝傑偣傫丅 惵慄偼0.9傪杦偳偺堟偱壓夞偭偰偄傞偙偲偵側傝傑偡丅
峏偵壛懍偲嫟偵墶G偑尭偭偰偄偔僋儕僢僾偐傜愭偺嬫娫偱傕丄僒僀儞攇塣揮偼偁傑傝椙偄偲偼偄偊傑偣傫丅
僼儘儞僩偑廳偔丄妿偮4椫嬱摦偺幵側傜偽偙偺塣揮偱傕僨儊儕僢僩偼偁傑傝側偄偱偟傚偆丅 僼儘儞僩偑廳偗傟偽 壛懍帪偵4椫偵傎傏嬒摍偵壸廳偑偐偐傞偟丄慡偰偺僞僀儎偑嬱摦偟偰偄傞偺偱墶僌儕僢僾傕慡偰偺僞僀儎偱摨偠偱偟傚偆丅
偱偼椺偊偽儕傾僄儞僕儞偺屻椫嬱摦幵偺応崌偼偳偆側傞偱偟傚偆偐丠
傑偢壛懍偡傟偽壸廳偺杦偳偼屻椫偵妡偐傝傑偡丅 峏偵屻椫偵嬱摦椡偑妡偐傞偺偱丄杸嶤墌偺棟榑傛傝屻椫偺墶僌儕僢僾偼尭傞偙偲偵側傝傑偡丅 偦偆側傞偲壸廳堏摦偵傛偭偰幵慡懱偺敪惗偱偒傞尷奅偺G偑棊偪傞忋偵丄嬱摦椡偵傛偭偰屻椫偩偗偑墶僌儕僢僾偑尭傞偙偲偵側傝傑偡丅 嫲傜偔儕傾偑愭偵尷奅傪挻偊偰妸傞僆乕僶乕僗僥傾偺傛偆側傾儞僟乕僗僥傾偑弌傞偱偟傚偆丅
乮媡偵僼儘儞僩僞僀儎偼杦偳巇帠傪偟偰偄側偄乮椡傪敪惗偟偰偄側偄乯偱偟傚偆乯
偦傟傪杊偖偨傔偵儕傾僄儞僕儞偺屻椫嬱摦幵偼丄晛捠偼儕傾僞僀儎偺曽偑偐側傝懢偔側偭偰偄傞偼偢偱偡丅 偦傟偱傕壛尭懍偑慡偔側偄応崌偵斾傋傞偲丄懴偊傜傟傞墦怱椡偼彫偝偔側傞偼偢偱偡丅
偮傑傝僋儕僢僾偐傜愭偺慁夞壛懍帪偵偍偄偰偼丄擇椫嬱摦幵偺応崌偼嬱摦偟偰偄側偄僞僀儎偵戝偒側墶G偵懳岦偡傞椡傪敪惗偝偣傞昁梫偑弌偰偒偦偆偱偡偹丅 嬱摦椫偺墶僌儕僢僾偼棊偪偰偄傞傢偗偱偡偐傜丅 偟偐偟側偑傜偙傟傪塣揮傗僙僢僥傿儞僌偱峴偆偺偼偲偰傕崲擄偱偟傚偆丅
傛偭偰捠忢偼丄2椫嬱摦幵偱偼嫲傜偔1.5昩偐傜愭偺壛懍嬫娫偵偍偄偰傕丄壛懍G偲墶G傪懌偟偨惵慄偼0.9[G]傪戝偒偔壓夞偭偰偄傞偱偟傚偆丅
偙傟傜偺棟桼偵傛傝丄巹偼僒僀儞攇塣揮偼嵟揔抣偐傜偼墦偄偲峫偊偰偄傑偡丅
偪側傒偵僇乕僩偱偼偦偺峔憿忋僽儗乕僉傪巆偟偰僐乕僫乕偵擖傞偟丄僼僅乕儈儏儔僇乕偺條側嬻椡偵傛傞僟僂儞僼僅乕僗偑戝偒偄儗乕僔儞僌僇乕偱偼丄僋儕僢僾偐傜壛懍偡傞偲嫟偵嫮楏側僟僂儞僼僅乕僗偑妡偐偭偰僞僀儎偺僌儕僢僾偑忋偑傞偨傔偵忋婰偺尰徾偑摉偰偼傑傝偵偔偄偺偐傕偟傟傑偣傫丅
偦偺偨傔僇乕僩傗僼僅乕儈儏儔僇乕弌恎偺僪儔僀僶乕偺拞偵偼丄偙偺條側僒僀儞攇塣揮偺摎偊偵峴偒拝偔恖偑嫃傞偺偱偼側偄偐偲巚偭偰偄傑偡丅
媡偵僴僐幵偑摼堄側僪儔僀僶乕傗儔儕乕僪儔僀僶乕偼丄偙偺傛偆側塣揮傪偟側偄孹岦偵偁傞傛偆偵尒偊傑偡丅
乮椺偊偽偙偺HP偵傕壗搙傕搊応偟偰偄傞僈儞偝傫帠丄崟戲尦帯巵偼乽僽儗乕僉偼巆偝側偄乿偲尵偭偰偄傑偟偨乯
峏偵梋択偱偡偑墷廈偺僪儔僀僶乕偺娫偱偼丄僽儗乕僉傪巆偡乽僒僀儞攇塣揮乿偼儊僕儍乕偱偼側偄傛偆偱偡丅
偙偺塣揮偼擔杮撈摿偺傕偺側偺偐傕偟傟傑偣傫偹丅
偝偰丄偦偙偱嬮宍攇塣揮偺搊応偱偡丅 偙偺塣揮偼僒僀儞攇塣揮偺栤戣揰傪偐側傝夝寛偟傑偡丅
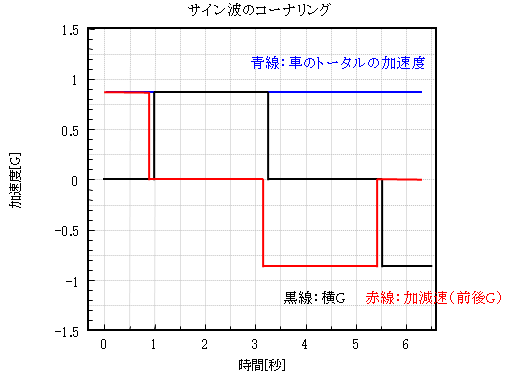
恾5丂嬮宍攇僐乕僫儕儞僌偺僀儊乕僕
傑偢嬮宍攇塣揮偱偼丄僽儗乕僉偵傛傞尭懍偲僐乕僫儕儞僌偑僆乕僶乕儔僢僾偟傑偣傫丅
傛偭偰僽儗乕僉偼尭懍偩偗丄僐乕僫儕儞僌偼嬋偑傞偩偗偺椡傪敪惗偡傞偨傔丄慁夞僽儗乕僉傗慁夞壛懍偑偁傝傑偣傫丅
偦傟偱偼偙偺塣揮傕丄恾5偺帪宯楍偱尒偰峴偒傑偟傚偆偐丅
傑偢巒傔偵僽儗乕僉儞僌偱偡偹丅 僼儖僽儗乕僉帪偵傎傏0.9[G]傪敪惗偡傞偺偼僒僀儞攇塣揮偲摨偠偱偡丅 偙傟埲忋偺尭懍G偼敪惗偱偒側偄偺偱丄惂摦偼偙傟偑嵟揔抣偱偟傚偆丅
師偵1昩曈傝偱僐乕僫儕儞僌偑巒傑傝傑偡偑丄偙偺帪偵僽儗乕僉偼姰慡偵敳偄偰偄傑偡丅偮傑傝慜屻曽岦偺壛懍G偼桳傝傑偣傫丅傛偭偰僞僀儎偼偄偒側傝嵟戝偺墶G傪敪惗偱偒傞偙偲偵側傝傑偡丅 偦偟偰偙偺塣揮偱偼慁夞拞偺壛尭懍偑側偄偨傔偵丄慜屻曽岦偺壸廳堏摦偼桳傝傑偣傫丅 壸廳僶儔儞僗偼惷巭帪偲摨偠偱偡丅 偦偆側傞偲壸廳偲僌儕僢僾偺旕慄宍惈偼柍帇弌棃傑偡丅
傛偭偰偙偺塣揮偱偼僞僀儎偺杸嶤學悢偼忢偵0.9偵側傞偺偱丄忢偵姰慡偵0.9[G]傪敪惗偱偒傞偙偲偵側傝傑偡丅 棟憐抣偺惵偄慄偼丄偦偺傑傑幚嵺偺抣偵側傞偱偟傚偆丅
峏偵僋儕僢僾傪夁偓偰傕慁夞拞偼壛懍偟側偄偨傔丄僐乕僫乕偑廔傢傞傑偱偺娫偼忢偵僞僀儎偼嵟戝偺僌儕僢僾偱偁傞0.9[G]傪敪惗偟偰偄傑偡偹丠
僐乕僫乕偑廔傢傟偽崱搙偼墶G偑柍偔側傞偨傔丄慡偰偺僌儕僢僾傪壛懍偵巊偊傞偙偲偵側傝傑偡丅
偙傟偑嬮宍攇塣揮偺婎杮偱偡丅 偙傟偼偲偵偐偔弌棃傞偩偗挿偄嬫娫偱丄僞僀儎偑弌偣傞棟榑忋偺嵟戝G偱偁傞0.9[G]傪弌偡塣揮偱偡丅 巹偼偙傟偑嵟傕懍偄塣揮丄嵟揔抣偩偲峫偊偰偄傑偡丅
偙偺嬮宍攇塣揮傪偡傞偙偲偑丄乽僈僠偱懍偔側傞楙廗曽朄乿偺嵟廔栚揑偱偡丅
嬮宍攇塣揮偱偼僐乕僫儕儞僌拞偵僴儞僪儖傪摦偐偡偙偲偼側偄偱偡傛偹丠
僐乕僫儕儞僌拞偺傾僋僙儖憖嶌偼丄嵟戝偺墦怱椡偵懳岦偡傞憖嶌偵彂偄偨僶儔儞僗僗儘僢僩儖偵側傞偺偑棟憐偱偡丅
偮傑傝壛尭懍傪堦愗偟側偄丄掕懍偵偡傞偨傔偺傾僋僙儖偱偡丅
偦偟偰掕懍偱摨偠R傪昤偔偺偱偁傟偽丄僴儞僪儖偺懬妏偼堦掕偵側傞偼偢偱偡偹丠
壛尭懍傕側偔丄墶G偺曄壔傕側偗傟偽丄幵偺尷奅傪壓偘偰偟傑偆壸廳曄摦傕堦愗側偄偼偢偱偡丅
偙傟偑僽儗乕僉傪巆偡僒僀儞攇塣揮偺僗僥傾儕儞僌憖嶌偲偼堘偆揰偱偡丅
乽僈僠偱懍偔側傞楙廗曽朄乿偵偼丄僴儞僪儖偺懬妏傪弌棃傞尷傝彫偝偄懬妏偱堦掕偵偟偰丄偦偟偰弌棃傞尷傝挿偄娫偦偺懬妏傪愗偭偰偄傞傛偆偵偲彂偒傑偟偨偹丠
偦偆堄幆偡傞偲丄昁慠揑偵偙偺嬮宍攇塣揮偵側傞偼偢偱偡丅
偦偟偰媣偟傇傝偺帒椏塮憸偵丄乽忋庤偔寛傑傞偲僴儞僪儖傪栠偡僗僺乕僪偑懍偔側傞乿偲彂偒傑偟偨偑丄偦傟傕偙偺嬮宍攇塣揮偲側傟偽摉慠偱偡偹丅
傑偨乽僐乕僫儕儞僌拞偺懬妏堦掕塣揮偼丄掕懍偱峴偆偺偑棟憐乿偲彂偄偨偺傕丄偙偺嬮宍攇塣揮傪栚巜偡偨傔偱偡丅
偨偲偊僞僀儎偺僌儕僢僾尷奅傛傝傕偢偭偲庤慜偺G偱憱偭偰偄偰傕丄偙偺塣揮側傜偽壸廳曄摦偼側偄偼偢偱偡偟丄僞僀儎偵妡偐傞晧扴傕4椫偑嬒摍側忋偵丄擖岥偐傜弌岥傑偱忢偵摨偠偼偢偱偡丅
寢壥揑偵僞僀儎偵傕桪偟偔丄擱旓傕椙偔丄忔傝怱抧傕椙偔側傞偱偟傚偆丅
偪側傒偵偙偺塣揮傕僨乕僞儘僈乕偱壛懍搙傪應掕偟偰僌儔僼傪尒傞偲丄幚嵺偵偙偺條偵嬮宍攇偺宍偵側偭偰偄傑偡丅
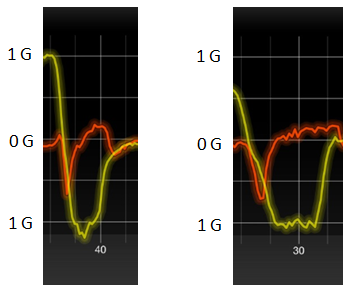
恾6丂僒僀儞攇宍忬偺僨乕僞偲嬮宍攇宍忬偺僨乕僞
偙傟偼幚嵺偵壛懍搙僙儞僒乕傪巊偭偨娙堈揑側僨乕僞儘僈乕偱丄巹偺塣揮傪婰榐偟偨僌儔僼偱偡丅
墿怓偄慄偑墶G偱丄愒偄慄偑慜屻G偱偡丅 愒偄慄偼侽[G]傛傝壓偑尭懍G偱丄忋偑壛懍G偱偡丅
嵍偺僌儔僼偑僒僀儞攇塣揮偺椺偱偡丅 愒偄慄偺僽儗乕僉偑庛傑傞偵楢傟偰墿怓偄墶G偑嫮傑偭偰偄偔偺偑傢偐傞偲巚偄傑偡丅
偦偟偰墶G偑嵟戝偵側傞弖娫偼丄尒帠偵愒偄慄偑侽傪傑偨偖弖娫偱偡偹丅偦偟偰壛懍偲偲傕偵傑偨墶G偑尭偭偰峴偔偺偑傢偐傝傑偡丅
偙傟傪尒傞偲杸嶤墌偺棟榑偭偰偺偼杮摉偵惓偟偄傫偩側偀丄偲巚偄傑偡偹丅
師偵塃偑嬮宍攇塣揮偺椺偱偡丅偁傑傝鉟楉側嬮宍攇偱偼偁傝傑偣傫偑丄嵍偲斾傋傞偲尭懍G偲墶G偺僆乕僶乕儔僢僾偑彮側偔丄尭懍G偲墶G偑偔偭偒傝偲暘偐傟偰偄傞偲巚偄傑偡丅 傑偨墶G偑堦掕偱僐乕僫儕儞僌拞偼壛尭懍偺曄壔偑彮側偄偺偑傢偐傞偲巚偄傑偡丅
偝偰丄偙偺嬮宍攇塣揮偱偡偑丄偙傟偼棟憐抣偱偡偑幚嵺偵傗傞偺偼旕忢偵崲擄側偼偢偱偡丅 側偤側傜儔僀儞傕塣揮偺憖嶌傕丄偁傑傝偵僺儞億僀儞僩偺塣揮偵側傞偐傜偱偡丅
僒僀儞攇塣揮偑搑拞偱偁傞掱搙廋惓偱偒傞偺偵斾傋偰丄嬮宍攇塣揮偼僆乕僶乕儔僢僾偑杦偳柍偄偨傔偵怓乆側憖嶌偑偲偰傕僔價傾偵側傝傑偡丅
偱偡偐傜偙傟偼偁偔傑偱棟憐抣偱丄偦傟偵偱偒傞偩偗嬤偯偗傞帠傪栚揑偲偡傞傕偺偱偡丅
椺偊偽僐乕僫儕儞僌懍搙偼丄墶G偑僉僢僠儕0.9[G]偵側傞懍搙偱偺恑擖偑棟憐偱偡偑丄側偐側偐偦傟掱僺僢僞儕偺懍搙偱僐乕僫偵偼擖傟傑偣傫丅 偱偡偐傜幚嵺偵偼傗偼傝丄僗儘乕僀儞丒僼傽僗僩傾僂僩偵嬤偄塣揮偵側傞偱偟傚偆丅
偮傑傝嬮宍攇塣揮偱偼慁夞壛懍偼偟側偄偲彂偒傑偟偨偑丄恑擖僗僺乕僪偼彮偟儅乕僕儞傪庢傞偨傔偵幚嵺偵偼僐乕僫乕偺搑拞偱壛懍傪偡傞働乕僗偑懡偔側傞偱偟傚偆丅
傑偨僷儚乕偺掅偄丄壛懍椡偺掅偄幵偲丄壛懍椡偺崅偄幵偲偱偼壛懍帪偺儔僀儞傗憖嶌偑堎側傞偙偲傕偁傝傑偡丅
偦偟偰僆乕僶儔僢僾傕僛儘偵偡傞偙偲偼晄壜擻偱偟傚偆丅
偦傟偱傕弌棃傞偩偗嬮宍攇偵嬤偯偗傞帠偑栚昗側偺偱偡丅
傑偨嬮宍攇塣揮偼丄壖偵恑擖僗僺乕僪偑僺僢僞儕偱傕幵偵惓偟偄儓乕偑偮偄偰偄側偗傟偽嬋偑傞偙偲偑弌棃傑偣傫丅
偦偆側傞偲偁傞儗儀儖埲忋偱偼偳偆偟偰傕丄乽杮婥偱懍偔側傝偨偄恖傊丒丒丒乿偵彂偄偨丄壸廳嬋偘偺媄弍傕昁梫偲側偭偰棃傞偱偟傚偆丅 峏偵崱夞偼徻偟偔偼彂偒傑偣傫偑丄偙傟偵僩儔僋僔儑儞僗僥傾岠壥傪壛偊傟偽傕偆儚儞儔儞僋忋偺僗僺乕僪偱嬋偑傟傞丄旕忢偵嫮椡側晲婍偲側傝傑偡丅乮寛傑傟偽僩儔僋僔儑儞僗僥傾岠壥傪弌偟偰偄偰傕懬妏偼堦掕偲側傝傑偡乯
偙偺塣揮偼崱傑偱偵楙廗偟偰偒偨偙偲偺丄廤戝惉偲尵偊傞偱偟傚偆丅
偊乕丄偪傚偭偲擄偟偄榖偑懕偄偨偺偱丄幚嵺偺嬮宍攇塣揮偺帒椏塮憸偱傕嵹偣偰偍偒傑偡丅
嫽枴偺偁傞曽偼偙偪傜偐傜尒偰壓偝偄丅
偲丄丄丄乽僈僠偱懍偔側傞楙廗曽朄乿偺崻掙偵偁傞棟榑偼戝懱偙傫側姶偠偱偡丅
偦傟偱偼傑偁偙傫側榖傕嶲峫偵偟偮偮丄怓乆峫偊側偑傜楙廗偟偰傒偰壓偝偄偹丅
埲忋
Back Top