四輪駆動車の基本特性
さて、では四輪駆動車を速く走らせる方法について考えてみましょうか。
MRとRRレイアウトの話では、リアエンジン車のコーナリング性能の優位性について解説しましたが、それと負けず劣らず、いや、走らせ方によっては勝ってしまうコーナリング性能を持っているのが、私は四輪駆動車だと考えています。
実際に今までにも、R35GT-Rのコーナリングの速さについては書いてきましたね。
世界のスーパーカーにニュルブルクリンクで勝ってしまうことがあるのは、パワーや車重の軽さではなく、そのコーナーの速さでした。
何かと曲がりにくいと言われている四輪駆動車ですが、4つのタイヤが全て駆動しているということ自体は、とてつもないアドバンテージなのです。
サスペンションを物理するの「センターデフの項」 に書いた通り昨今、と言ってもこの20年位のスポーツ四駆は、主にセンターデフを電子制御にすることによってコーナリング性能を上げてきましたが、まずは電子制御抜きでの走らせ方についてから始めてみましょう。
あくまでこれが基本です。
電子制御なしでも速く走れるのかに書いたように、電子制御が無くとも、ビスカスカップリングのセンターデフであっても、ちょっとしたセッティングや運転方法で、四輪駆動車は速く曲げることが出来るのです。
電子制御というものは、そのセッティング幅を広げたり、あらゆる場面のコーナーに適合させたり、或いは技量の低いドライバーでもそれなりに速く走らせるための道具だというのが、私の考えです。
あくまで、“素の四駆”を速く走らせられるようになってはじめて、そのドライビングの幅を更に広げてくれるものが電子制御なのです。
”素の四駆”を速く走らせられる方法をマスターしないと、電子制御が一体何をしてくれて何を補助しているのかを理解することは難しいでしょう。 つまり、誰でも行き着くことが出来る壁にぶつかって、そこで終わることになります。
ではまず始めに、他の駆動形式同様にエンジンの搭載位置による、基本特性について考えてみましょうか。
国産の四輪駆動車は、(軽トラックなど一部を除き)ほぼ全てがフロントにエンジンを搭載しています。
特に走りを重視した“スポーツ四駆”と言われているモデルは全てそうですね。
ということは、エンジン搭載位置による、基本特性に書いた通りコーナリング時の遠心力はフロントに大きくかかります。
それはフロントタイヤを外に滑らそうという力が大きくなるだけでなく、リアエンジンの項に書いたようにヨーを戻そうとする力にもなりますね。
これらの力が相まって、エンジン搭載位置から来る基本特性が、フロントタイヤが先に限界を超えやすい、アンダーステア特性となります。 まあこれは、FF車やFR車と同じです。
ということは、これも、エンジン搭載位置別の、最大グリップの出し方に書いた通り、車体の姿勢を内側に向けてやることで、遠心力のバランスを前後で揃えてあげることが出来ることになりますね。
遠心力 F = m r ω2
ですから、フロント部のrを小さくし、リア部のrを大きくしてやることで、前後の遠心力が等しくなることが出来るでしょう。
(遠心力は雑誌などでよく見るv2/rでも表されますが、姿勢を内側に向けるとrもvも前後で変わるため、これからは角速度ωを使います。 角速度は当然前後で同じなので。 ちなみに物理学では角速度を使うのが普通です)
とまあ、ここまでは今までの解説と同じです。 では四輪駆動になったことで何が変わるのでしょうか?
ここから先はエンジン搭載位置の話ではありません。 四輪が駆動していることによる特性の話となります。
とは言っても、エンジン搭載位置と4輪の駆動を活かした運転は、実は統合されて同じ答えとなりますから、このエンジン搭載位置の話も覚えておいてくださいね。
さて、ではまず始めに図1を見てください。
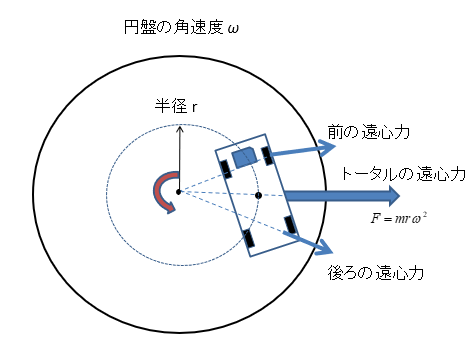
図1 四輪駆動車に掛かる遠心力
FFやFR車同様に、この様に車体をイン側に傾けて置くことで、エンジンに掛かる遠心力を相対的に小さく出来ました。
これにより重たいフロントに掛かる遠心力は小さくなり、軽いリアに掛かる遠心力が大きくなるため、最大の速度でコーナリング出来るようになる……。
果たしてそうでしょうか??
確かに重いフロントが遠心力で外側に膨らんでヨーを戻したり、フロントタイヤを滑らせたりしにくくはなるでしょう。
ですがこれが最適解でしょうか??
前後がインベタで走るのと比べ、むしろリアタイヤに掛かる遠心力を増やすことで、リアの限界を低めて前後の限界が超えるバランスを取っただけでは?
確かにそれでも前後に同じ力が掛かることによりヨーが戻らなくなる効果があるため限界は上がりますが、更にもっと上の限界はないでしょうか?
コーナリングというとどうしても車体の横方向の力を考えがちですが、縦はどうでしょう?
そもそもタイヤの話に書いた通り、タイヤのグリップは荷重に対して非線形でした。 <― これ本当に重要です
ここでその話が再びキーとして登場するのです。
始めに加速時のトラクションは、あらゆる駆動方式の中で四輪駆動車が最も高い、ということに関しては異論はないでしょう。
MRやRRでさえ、四輪駆動車にはかないません。
では、 それはなぜでしょうか?
ここまで来ると、「四輪が駆動しているため、力がすべて伝わるから」などと言った漠然とした答えにはなっていないことを期待しています(笑)。
四輪駆動車が出せる最大の加速Gは、タイヤの摩擦係数μ[G]でしたね。
これは最適解へのアプローチにも書きましたが、車を加速させるうる理論上最大の力は、車重をm、重力加速度をg、タイヤの摩擦係数をμとすると、
F = μmg
で、力割る質量が加速度なので、
a = F/m = μg
加速度の単位をm/s2から[G]表記に変えて、
g = 1[G]なので、μ[G]。
これが、四輪駆動車が出せる、理論上最大の加速度でした。
これは全車重を、駆動するタイヤを押し付けるための力として利用できるケースです。
これが後輪駆動車ならば、車重の全ての荷重を駆動輪に載せることが出来ません。
もちろんバイクの様にウィリーでもすれば別ですが、自動車は必ず前輪にも少なからず荷重は乗っています。
(逆に言えば、後輪駆動車がウィリーを維持出来ればタイヤの摩擦係数の非線形性を無視した場合、理論上は四輪駆動車と同じトラクションが得られる事になる)
ゆえにリアタイヤに載る車重をm rとすると後輪駆動車は、
F = μ m r g (ただし、m r < m)
これはいいですね?
さて、では次のステップです。
続く……。
Back Top