電子制御なしでも速く走れるのか
では電子制御によるアクティブセンターデフの威力がわかったところで、敢えて尋ねましょう。
ビスカスカップリングのセンターデフ搭載車は、電子制御のセンターデフ搭載車よりも絶対に速く走れないのでしょうか?
私の答えは、「NO」です。
ええ、今までさんざん四輪駆動車はセンターデフを電子制御にすることで速く曲がれるように進化してきたと言いましたが、敢えて私はNOと言いましょう。 皆さんも少し理由を考えてみてくださいね。
センターデフを電子制御にした最大の理由は、”回頭性の確保”でしたね?
つまりターンインから旋回中に起きる、”タイトコーナーブレーキング現象”を起こさないためにデフの拘束力を緩めることが最大の目的だと言っても良いでしょう。
ではデフの拘束力を強く固定したまま、タイトコーナーブレーキング現象を起こさない方法はないのでしょうか??
いいですか? そもそもタイトコーナーブレーキング現象は、前輪と後輪が通るラインが異なるために違う距離になる、いわゆる内輪差があるから起きましたね? ではそれを無くせは理論上この現象は起きないはずです。
つまり、前輪と後輪が常に同じ距離を走るような走り方をすれば起きないことになるでしょう。
ん? 簡単すぎましたか?
では更に思考を進めてみましょう。 もしも内輪差が逆方向に起きたらどうなるでしょうか?
つまり、前輪よりも後輪が外側を通り、後輪の方が長い距離を走るとどうなるでしょう?
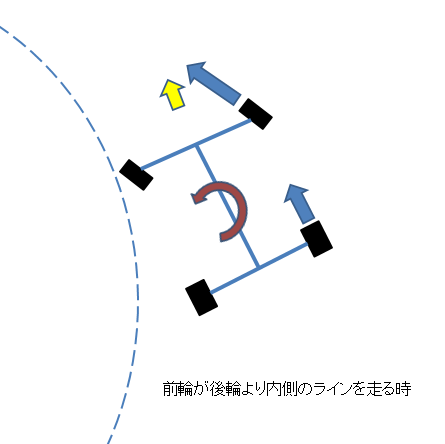
図3 内輪差が逆のケース
まずは車が加速時のケースを考えてみます。 この時、センターデフがヨーにもたらす影響に書いたのと同様、荷重の乗る後輪の回転数に前輪が従っているとしましょう。
はい、今度はヨー戻さないどころか逆方向にヨーがつくことになりますね?つまり今度は、ヨーを増やす方向です。(図3)
タイヤを滑らせずに実際にこの姿勢で曲がり続けることが出来るかどうかは置いておいて、理論上は車体の姿勢作りによりこの挙動を出すことが出来ることになりますね? (ついでに実際にやる方法も考えて見え下さいね。 ヒントは”アライメント”です)
逆に減速時には前輪のグリップが支配的になるので、後輪が回転不足でハーフロック状態となり、また前輪にはブレーキが掛かるため、両輪とも後ろに引っ張られる形となって若干ヨーを戻す方向になるでしょう。
ただこの時ヨーを戻す力は、両輪とも後ろに引っ張られる方向のため、センターデフがヨーにもたらす影響に書かれた後輪が内側を通るときよりも小さくなる、つまり多少は曲がりやすくなるはずです。
ただどちらの姿勢時(ライン)にせよ、センターデフを持つ四輪駆動車は減速時にヨーを戻す力が働くので、グリップ走行にてコーナリング中に長くブレーキを残す運転はあまり向かない、と言えるでしょうね。
では更に別解をもう一つ。
もし車体の姿勢やラインは変えずとも、前後輪ともアクセルオンによりホイールスピンしていたらどうなりますか?
タイトコーナーブレーキング現象は前後輪のどちらかがグリップしているから起きるものでした。
ですがアクセルオンで両方共ホイールスピンしていると抵抗を受けるのは純粋にエンジンだけです。
つまり前後輪とも動摩擦係数による力(μmg)で前に進もうとしているので、これまたタイトコーナーブレーキング現象は起きないことになります。
よく上級者が四輪駆動車の四輪ともを滑らせながら曲げているのは、無意識のうち、或いは経験的にこれを理解してやっているのでしょう。
つまり電子制御のセンターデフというのは、基本的にグリップ走行向けなのです。
参考動画:
これは私がアセットコルサにてビスカスセンターデフ搭載の四輪駆動車(ランエボⅥ)で、ニュルのスプリントコースを走ったものです。
殆どのコーナーで、図3の様な姿勢で曲がっていると思います。 タイヤは少し滑っていますが、途中でヨーが戻っていないのがわかると思います。
ちなみにこのコースでこの車でこのタイムは、ロシアのプロシミュレータライバー(こんな職業有るんですね)が出したベストタイムと同タイムなので、かなり速い(つまり最適値に近い)と思います。
だからドリフト走行が基本であるグラベルやスノーロードでは、センターデフはロックに固定でも問題なく速く走れるわけですね。
ちなみにランエボⅦ以降についているACDの切り替えスイッチは、路面により走り方を変えるのに対応したものでしょう。
私はドライの舗装路でターマックモード以外で走っている人を見たことがありませんが(むしろそれでも曲がらないと言ってACDコントローラーを入れる人も居ますね)、グラベルモードやスノーモードでは旋回時にもACDのデフの拘束力を殆ど緩めなくなっていきます。 これはビスカスカップリングの固定デフに近いとも言えますね。
ただ実際のセンターデフの効きはビスカスの様にマイルドではなく電磁クラッチでガッツリ効くのでより、ビスカスデフよりもより四駆らしい挙動かもしれません。
エボ7試乗記にも書きましたが、私はドライの舗装路であってもスノーモードが最も車を速く走らせられました。
ただその時はもちろん、四輪とも滑っています。(なぜそれが一番速く走れるのかは、また駆動方式別ドライビング方法の話にでも書く予定です)
前回書いたように、インプレッサだとGDBのC型で、DCCDがロックに近い方が運転しやすかったのも同様の理由でしょうね。
ただコントロール性は、圧倒的にランエボの方が上だったと記憶しています。
インプレッサはF型(鷹目)でセンターデフにイニシャルトルクを与えたそうで、DCCDのオートモードがとても洗練されて良くなっていました。 スバルはどの車種も時間とともに完成度が上がっていくのが社風のようです(笑)
(スバルの中古車を買うなら、最終型がお薦めです)
さて、はじめに「四駆は事情が非常に複雑だ」といった理由が判ってきましたでしょうか??
駆動輪が倍になったら自由度も倍かと思いがちですが、倍ではすみませんね。
3つのデフを持ち、それも加速時、減速時、前後輪のラインの関係(距離)、グリップしてるか滑っているかによって特性が全く変わってしまうのですから。
難しいですが、これらを全て理解しないと四輪駆動車を速く走らせることは出来ません。
だから理解したくない人向けに、電子制御が搭載されているのでしょう(笑)。
アクティブセンターデフを持つスポーツ四駆ならば、 グリップの範囲内で電子制御を使って走るのが恐らく最も楽で、しかもあるレベルまで速く走れてしまいますからね。 (あるレベルと言っても、太いハイグリップタイヤを履けばかなり速い)
それも一つの四駆との付き合い方だと思います。 ですが、四輪駆動車には明らかにその先の世界が有るのですよ。
ただしそのためには、四駆に合わせた特有の運転が必要となるのです。
(本項はセンターデフの話なので運転方法には踏み込みませんが、四駆の運転方法についてはまた改めて書く予定です)
ではチラッと、その”先の世界”を見てみましょうか。
よくランエボは「電子制御で曲がるから速い」、なんて言われていますね。
ですが下の中谷明彦選手ドライブによる、電子制御が一切入っていないフルノーマルのエボ5RSのコーナリングを見てみてください。 (RSはもちろんビスカスのセンターデフの上、リアデフは機械式でAYCも搭載されていないモデルです。(ABSすら無い))
ううむ……。 一部ウェットでこのタイムは……。(2ヘアのハンドルの戻し方なんて、芸術的ですね)
この走りは図3の姿勢や、参考動画のシミュレーターによるコーナリング姿勢に近いですね。
特に中谷選手が”理想的な姿勢”だと言っている最終コーナーの区間タイムでは、世界有数のコーナリングマシンであるNSXタイプSゼロにも勝っていますね。
ちなみにタイヤは98年当時の大したグリップのない純正タイヤで、筑波サーキットも緑のエスケープの様なインチキゾーンが出来る前のコースなのにも関わらず、Carトップ誌によると約6年後にエボ8MRが僅かに塗り替えるまでは、ビスカスセンターデフ搭載のエボ5が歴代のランエボの中で筑波最速でした。
ちなみにACDを搭載するエボ9も8も7もエボ5のタイムには勝てていないみたいです。
(余談ですが、エボ6は乗り心地改善のためフロントの足廻りの変更(ロールセンターを下げた)事により、旋回性能が落ちてタイムも落ちたようです。 足廻りが最適化されたトミ・マキネンエディションについては、タイムのデータなし)
つまり拘束力が固定のビスカスセンターデフであっても、乗り方さえ正しければ四輪駆動車はとてつもなく速く曲がれる、ということです。
まあ、そんな話も覚えておいてください。
以上、長く続いた四輪駆動車のセンターデフの話は取り敢えずこんなところで……。
続く……、かも……。
Back Top